作者:Zengkun Li
参与:刘晓坤、李泽南
鉴于当前认知神经科学和人工智能工程所遇到的困难,华为 2012 实验室的研究人员提出了一种新的通用人工智能工程方法:使用学习算法的稳定性作为在特定场景中的适合度函数的启发式搜索方法。论文将其方法与人工设计方法、仿生学方法进行了对比,结果表明该方法更加有望实现通用人工智能,并且和认知神经科学有更好的交互作用。
作者指出虽然可以直接在这篇论文中提出其工程方法,但为了刚好地解释这个方法的必要性和可行性,以及使无相关背景的读者能更好地理解,因此介绍当前的主流人工智能工程方法的背景,并指出其中面临的挑战,以及这些挑战对实现通用人工智能的阻碍是很有必要的。
因此,这篇论文只介绍了该方法的一般过程和方法论并忽略了进一步的细节,并且只对方法论做了粗略的分类。该论文首先介绍了认知神经科学的现状,然后讨论了两种主流的工程方法:以元学习为代表的人工设计方法,和以神经架构芯片为代表的仿生学方法。
1.1 认知神经科学的研究现状
为了阐明当前人工智能工程方法的局限性来源和它们与认知神经科学的联系,作者首先了介绍了认知神经科学的研究现状。
目前,认知神经科学在人类大脑微结构(主要是神经元和突触)上的研究已经比较全面,对其中的化学过程和电学性质都得出了清晰的结论。对于神经元,spiking 模型是其中最重要的特征。而对于神经突触,由 STDP 和 LTDP 描述的特征也得到了充分的研究。
然而,在大脑宏观结构和其智能功能性上的研究仍然处于早期阶段,目前对于人类大脑智能的机制仍未得到任何重要的结论。此外,在这个领域的主流研究方法也受到质疑。基于 MRI 影像的方法在目前的神经科学中是最重要的研究方法之一。在 Eric Jonas 和 K.P. Cording 的论文中,他们讨论了基于 MRI 的方法是否可以用于分析电子芯片的理论 [1],以此表明该方法无法从微观行为特征得到关于宏观功能性结构的结论。
该论文还揭示了认知神经科学研究如果没有程式化的理论指导,无疑将很难研究诸如人类大脑这样的复杂组织。因此,虽然认知神经科学启发了人工智能的研究,但它同样非常需要来自人工智能的研究以指导其研究方向,即它们可以互相促进。
简言之,当前的认知神经科学无法为人工智能工程(无论是当前还是可预见的将来)提供有价值的启发。类似地,认知神经科学自身仍将处于成果匮乏的局面。
1.2 人工设计方法
人工设计方法一般指的是元学习。元学习是一个很宽泛的概念,因为它还只处于早期发展阶段,其中有很多种工程方法,但只有少数几种的研究目标和这篇论文所定义的人工智能是一致的。其中包括了:基于梯度预测的方法 [2]、基于损失预测的方法和基于 LSTM 的更新方法 [4]。
这些方法由深度学习、强化学习和其它传统的神经网络学习算法导出。在这些传统学习算法中,反向传播算法和策略梯度算法都独立于神经网络,并在网络之外更新网络连接权重,因此这和这篇论文的人工智能定义不一致。虽然上述的元学习方法和传统神经网络学习方法的建模方法是类似的,但它们还包括了在网络结构中更新网络连接权重并将其作为学习的目标,从而其研究对象和这篇论文所定义的人工智能是一致的。
然而,这些方法在人工设计上是完全独立的。人类大脑拥有几百亿个神经元,平均每两个神经元之间有超过 100 个神经连接。上述的当前认知神经科学对于大脑的结构和功能得到的结论还是很初级的,基本上不能提供认识通用人工智能的决定性启发。同时,人类大脑在自然选择中已经经过了几百万年的进化。即使人工设计方法在人类环境中不是最优的解决方案,它们也是近似最优的。还可以进一步推断出,即使通用人工智能的实现并不是基于 100% 模仿人类大脑认知机制,至少该结构将拥有近似的复杂度。从以上讨论中作者得出,目前实现通用人工智能的方法等价于在一个巨大的搜索空间中利用非常有限的先验知识寻找近似最优解。如果依靠人工探索,很难想像在可预见的未来内能找到正确的神经网络架构和学习算法。
当前这些方法生成的人工智能系统的实际性能在多样性和鲁棒性上仍远远落后于人类智能。依赖人工设计的另一个后果是无法与认知神经科学进行交互并互相促进发展。上述方法中,无论是微观神经元特征、宏观网络结构,甚至网络的更新算法都和认知神经科学的研究相去甚远。
1.3 仿生学方法
仿生学方法以神经架构芯片为代表,例如 IBM 的 TrueNorth 芯片 [5],其使用了电子元件以部分地模拟人类大脑的生物学特征(比如 spiking 模型、神经元突触的可塑性,等等)。然而,由于对人类大脑的认知神经科学理解的限制,这些模拟仍然处于微观层次,而不包含人类大脑神经网络的宏观结构。即使在微观结构,对神经元和其中连接的模拟也不能说是完整的。就是说,某些对于智能产生的关键特征可能被忽视了。
由于仿生学方法追求真实地模仿人类大脑的生物学特征,可视其为相对于人工设计方法的另一个极端。然而,这类方法的最大问题是它无法和认知神经科学进行交互,因为它完全单向地依赖于认知神经科学研究的结果。
2 本文使用的方法
鉴于在 1.1 节中所提到的当前认知神经科学和人工智能工程所遇到的困难,本文提出了一种新的通用人工智能工程方法:使用学习算法的稳定性作为在特定场景中的适合度函数(fitness function)的启发式搜索方法。
2.2 模型
本文中使用的方法基于启发式搜索算法,这是一种在解空间中使用的优化算法,用于加速逼近最优解的搜索过程,其中以遗传算法(由 J. D. Bagley 提出)为代表 [6]。此外,类似的算法还包括粒子群优化算法、模拟退火算法、蚁群优化算法等等。
虽然它们都属于同一类算法,但都各有其不同的应用领域。其中,模拟退火算法和蚁群优化算法可以通过将为解决的问题映射到空间相关的问题中,并进行搜索找到最优解,所以它们更适合空间相关的问题。本文中的方法的目标是搜索人工智能智能体,其问题特征并不和空间直接相关,因此上述这些算法并不适用。而遗传算法和粒子群优化算法通过建模解决问题,然后通过适合度函数评估候选解。因此,它们更适合用于本文方法所能解决的问题。关于遗传算法或粒子群优化算法还是其它类似算法的使用,本文并没有限制于工程需要或实验结果的层面。下图以遗传算法为例,描述了这种算法的工作流程:
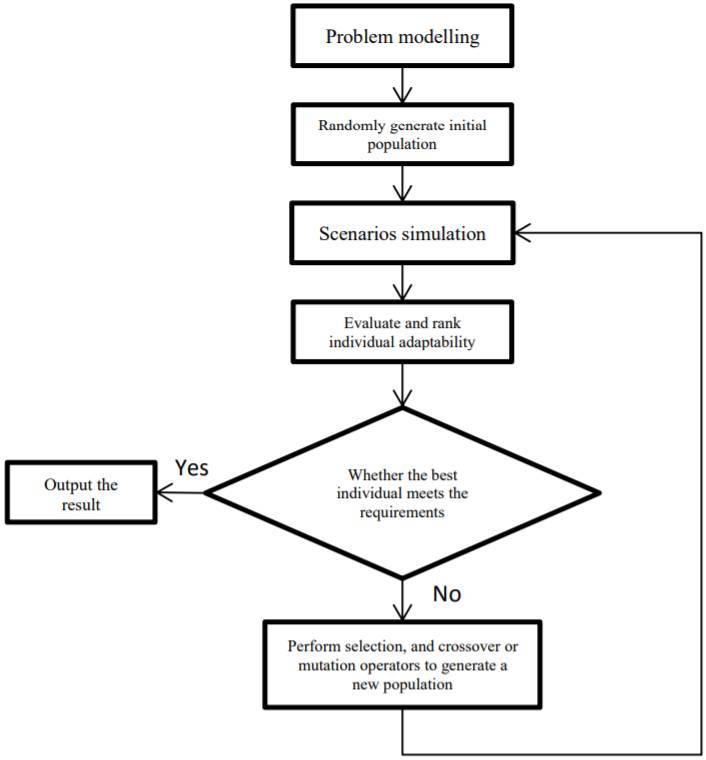
图 1:遗传算法的工作流程:问题建模;随机生成初始群体;场景模拟;评估个体适应性并分级;表现最好的个体是否达到需求;是,输出结果;否,进行选择,交叉或突变操作以生成新的群体。
本文中提出的启发式搜索算法主要由三部分构成:问题建模、适合度函数定义和适合度函数的输入(场景模拟)。
本文提出的方法基于问题导向建模的启发式搜索算法和适应性评估(例如遗传算法或粒子群优化算法)。因此,整个工作流程和图 1 所示的很类似。在建模方面,该方法使用了全连接神经网络模型,以及认知神经科学中关于神经网络微结构特征的先验知识以模拟智能体;在适合度函数方面,作者主要测试了智能体在确定场景中执行任务的可重复性和稳定性。以相同的遗传算法为例,本论文中的方法的完整工作流程如下图所示,以图 1 的每一步的具体实现目标为对照:
问题建模:全连接神经网络结构和微结构特征的 one-hot 编码字符串;
随机生成初始群体:连接权重的随机初始化和微结构特征编码的随机初始化;
场景模拟:智能体行为和任务模拟的环境;
表现最好的个体是否达到需求:智能体是否能可重复地和稳定地执行任务?
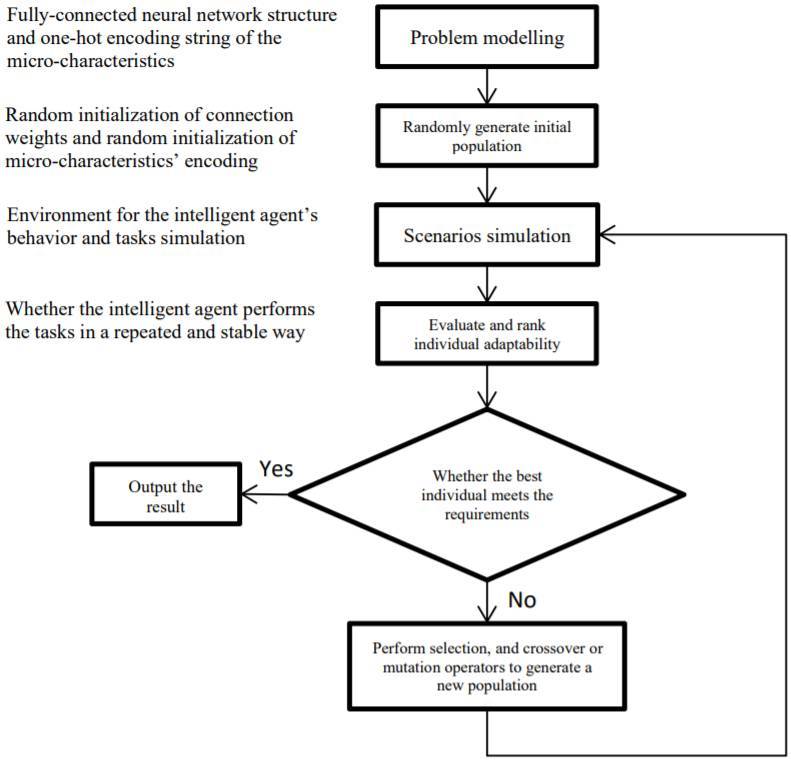
图 4:本文方法的完整流程
论文:A Heuristic Search Algorithm Using the Stability of Learning Algorithms as the Fitness Function in Certain Scenarios: An Artificial General Intelligence Engineering Approach
论文链接:https://arxiv.org/abs/1712.03043
摘要:这篇论文提出了一种非手工设计的基于启发式搜索算法在解空间搜索候选智能体的工程方法,该解空间由人工智能智能体在仿生学基础上建模而形成。通过和以元学习为代表的人工设计方法以及以神经架构芯片为代表的仿生学方法进行比较表明,该方法更加有望实现通用人工智能,并且和认知神经科学有更好的交互作用。同时,该工程方法基于一个理论假设即最终的学习算法在确定的场景中是稳定的,并且可以泛化到不同的场景中。本文初步地讨论了理论层面,并提出了该理论和不动点定理在数学上的可能联系,但目前仅仅是个猜想。
